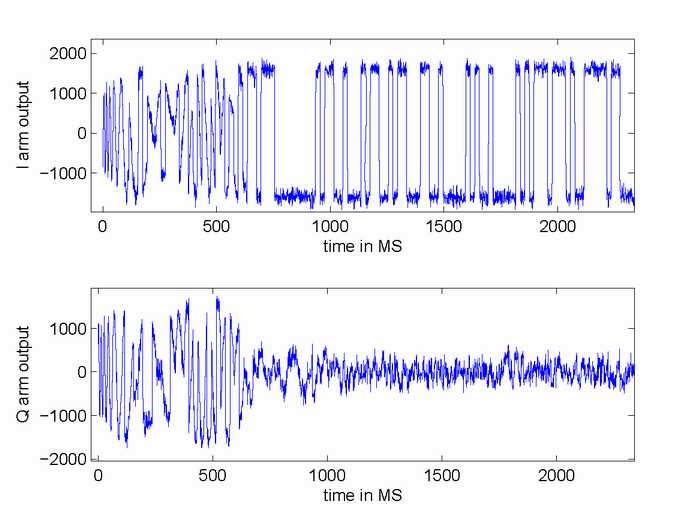
The output of I_arm and Q_arm during transition from acquisition to tracking.
The output of I_arm and Q_arm during stable tracking.
![]()
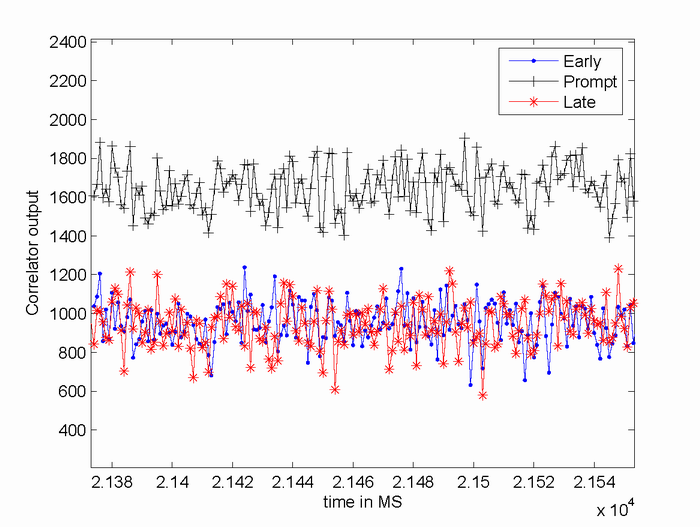
Plot of Early, Prompt and Late correlators' output.
The plot of I .VS. Q during stable tracking.
![]()
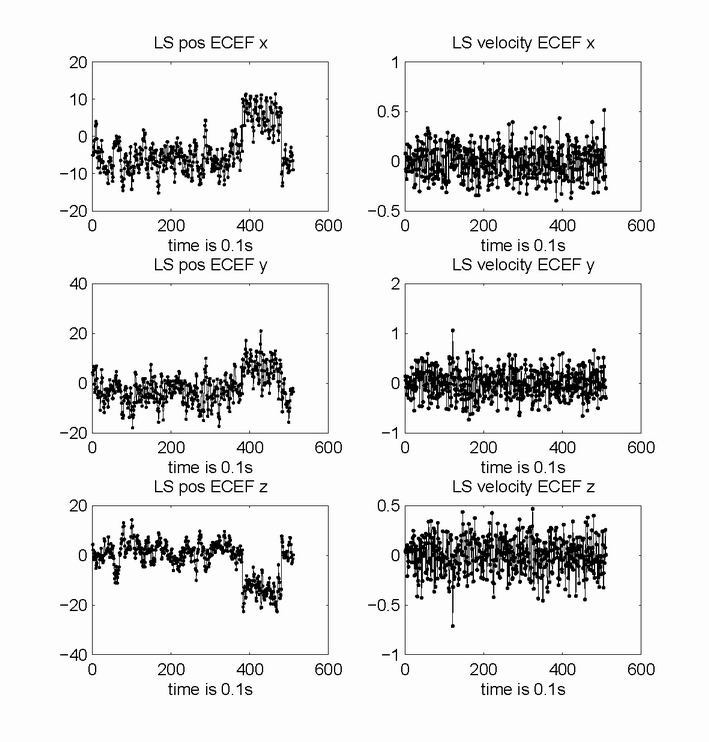
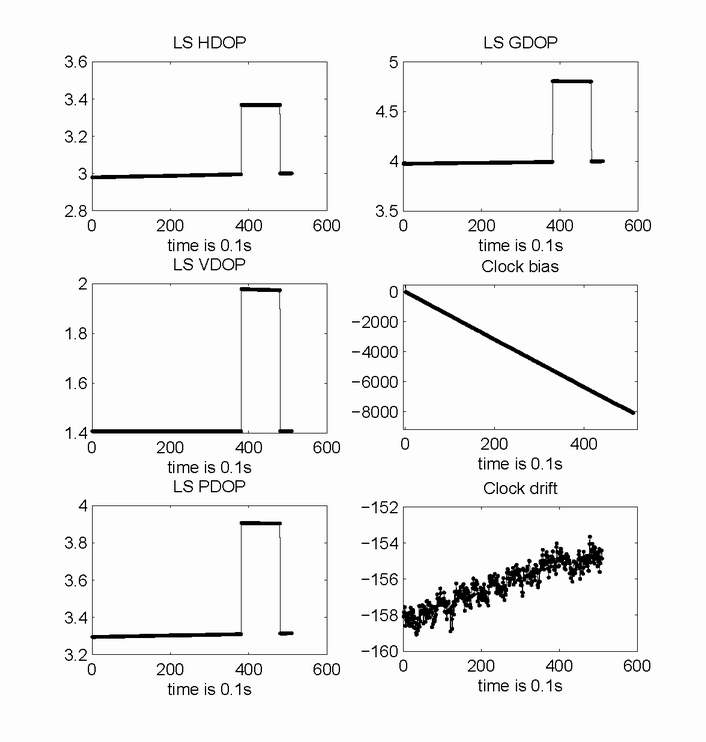
The plot of PVT fix result from LS algorithm.
The plot of DOPs and local clock bias and drift. DOPs change a lot at instant of around 38 seconds due to intentionally remove one SV from the fix SV set.
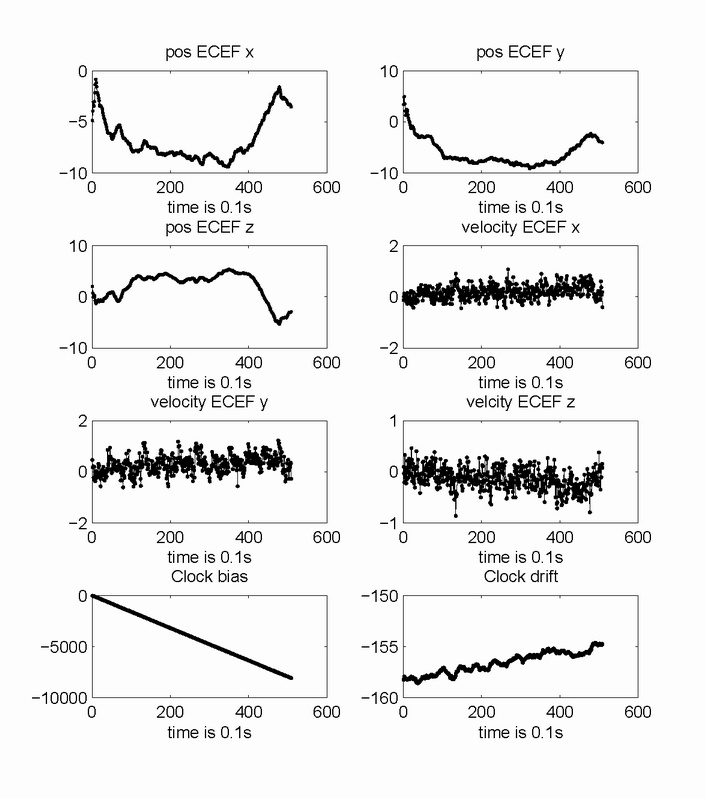
The plot of PVT resolution from Kalman Filter algorith. PV-model KF has 8 states, which are [Pos_x, Pos_y, Pos_z, Vel_x, Vel_y, Vel_z, Bias, Drift].
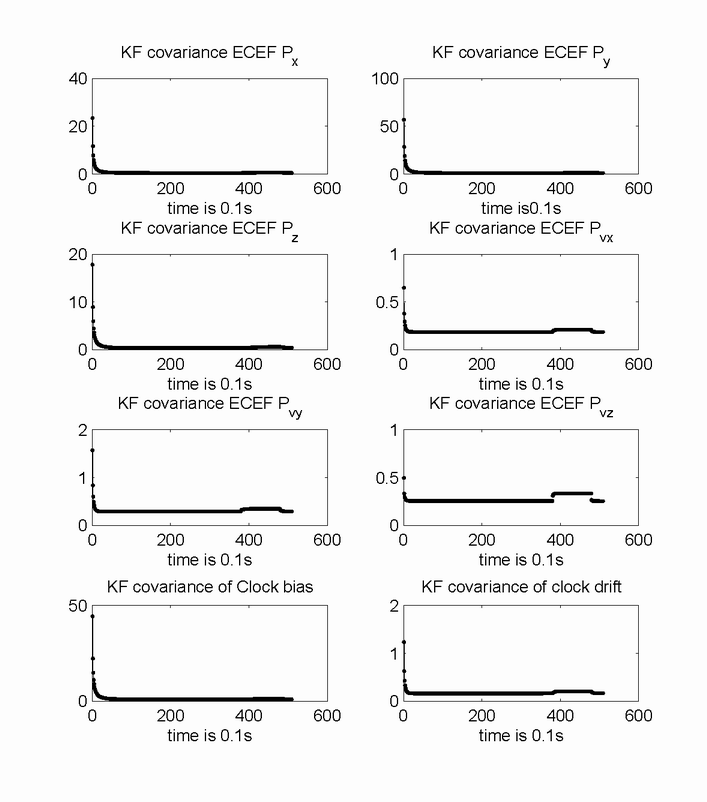
Plot of the diagonal element of P matrix in Kalman filter algorithm.