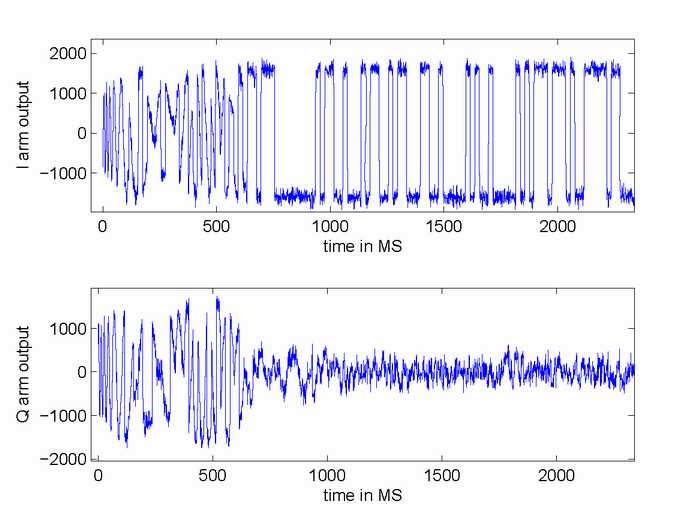
在从伪码相位跟踪到载波相位跟踪过渡阶段的同相路(I_arm)和正交路(Q_arm)的积分器输出。
在伪码和载波都实现了稳定的相位跟踪阶段的同相路(I_arm)和正交路(Q_arm)的积分器输出。
![]()
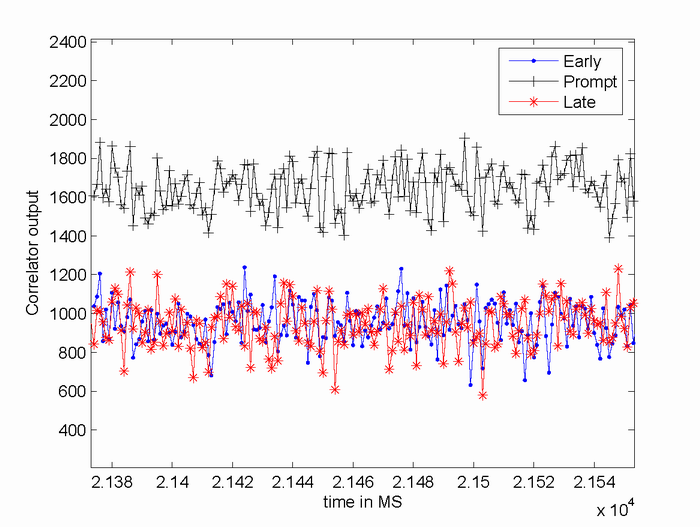
超前,中间和滞后码的相关器的输出。
同相路积分输出.VS.正交路积分输出。
![]()
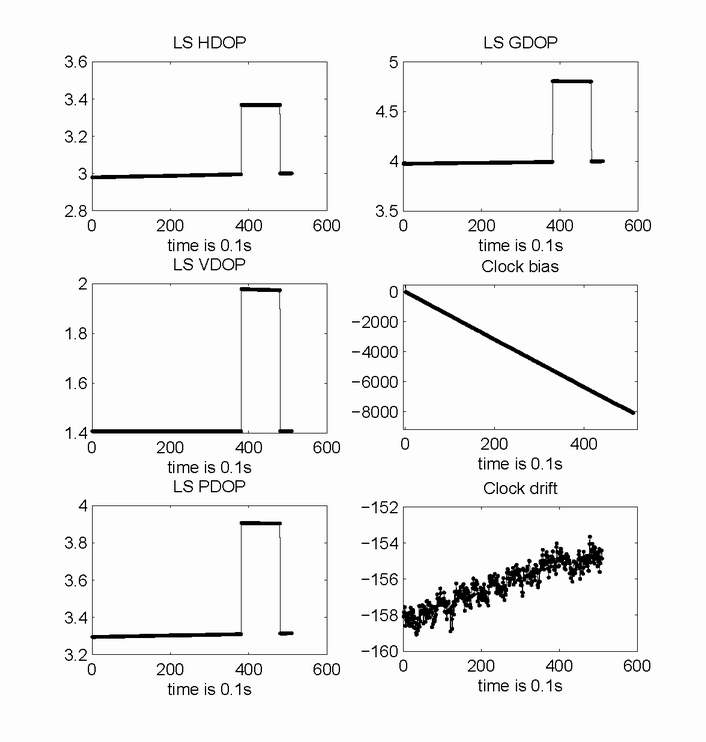
LS算法输出的定位结果,包括位置,速度。
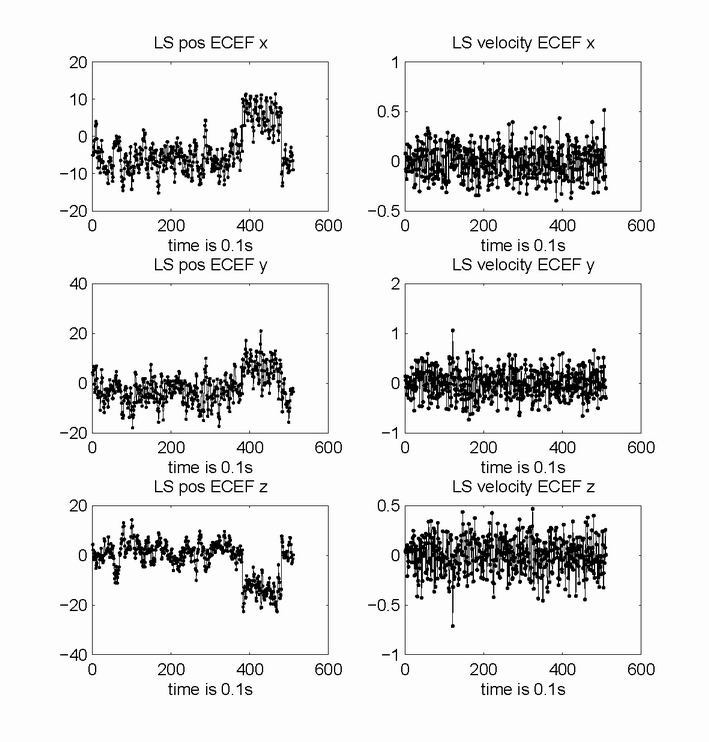
几何精度因子和本地时钟的种差和钟漂。几何精度因子在大约38秒的时刻有一个比较大的变化,原因是人为地将一个卫星从定位卫星集合中拿掉的缘故。
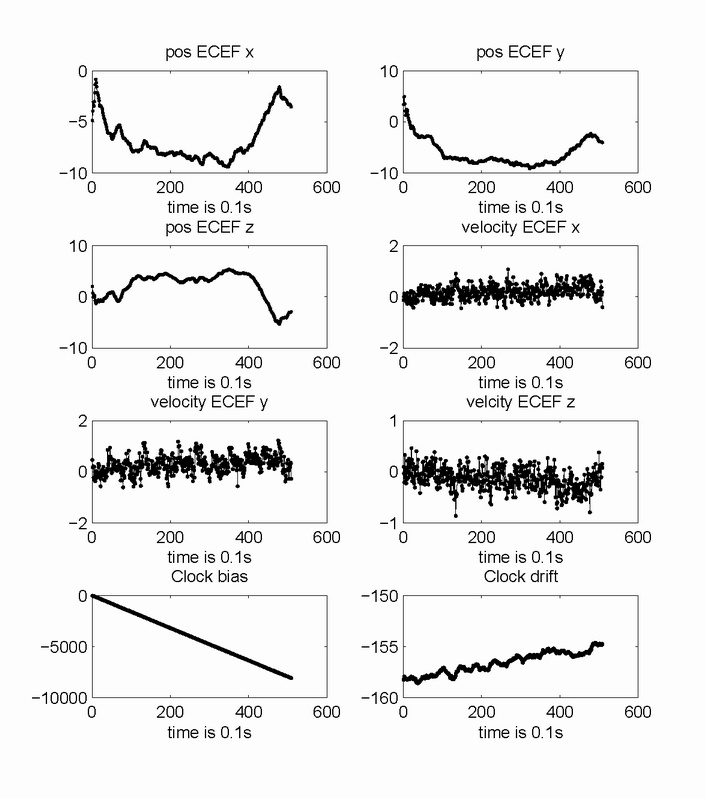
Kalman Filter输出的状态量,包括[Pos_x, Pos_y, Pos_z, Vel_x, Vel_y, Vel_z, Bias, Drift].
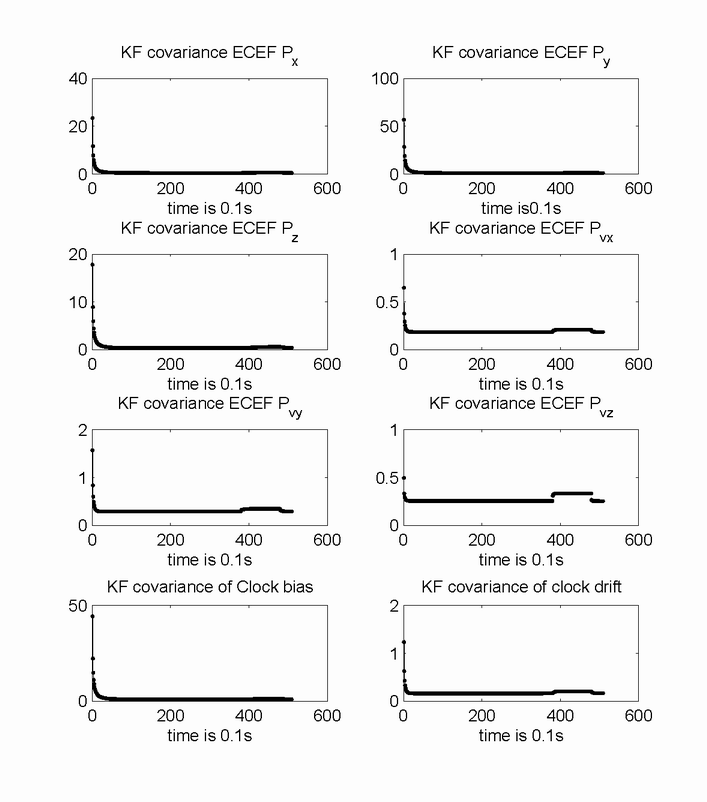
Kalman Filter的系统状态量的协方差矩阵的对角元素。